Техника и вооружение 2011 06 - [20]
«— применение в танках разработанных ГТСУ позволило получить существенные преимущества по тягово-динамическим и эксплуатационным качествам;
— конструкция танка Т-64А с ГТД-1000Т не обладает необходимой надежностью;
— в процессе отработки ГТД и танка были выявлены серьезные технические проблемы по обеспечению работоспособности двигателя в условиях повышенной запыленности, а также трансмиссии и ходовой части в связи с увеличением мощности двигателя и скорости движения, ГТСУ имеет повышенный расход топлива и не обеспечивает требуемый запас хода, что требует дополнительных решений».
Для устранения выявленных недостатков и успешного выполнения поставленной задачи по созданию танка Т-64А с ГТСУ с более рациональным использованием сил и материальных ресурсов предлагалось:
«— в текущем году, вместо 20 танков, ограничиться изготовлением 10 танков Т-64А с двигателем ГТД- 1000Т с сохранением плана поставок БТ техники на 1970 г.;
— в плане на 1971 г. предусмотреть изготовление дополнительных 10 танков с ГТД, на пяти из которых реализовать конструктивные изменения трансмиссии и ходовой части, обеспечивающие использование преимуществ ГТД и мероприятия по увеличению запаса хода танка до параметра заданного в ТТТ;
— рассмотреть возможность установки двигателя с уменьшенным расходом топлива и более мощного вооружения».
Разработка новой конструкции ходовой части танка Т-64А с ГТСУ потребовала в целях исключения ошибок в идентификации двух опытных машин ввести ранее существовавшее внутризаводское обозначение танка ЛКЗ «Объект 219» 27* в официальные документы.
27* Опытный танк Т-64А с ГТСУ в период производства на ЛКЗ во внутризаводской конструкторской документации получил два обозначения в зависимости от исполнения ходовой части:
— «Объект 219 сп 1» — с ходовой частью харьковского завода им. В. А. Малышева;
— «Объект 219 сп 2» — с ходовой частью ЛКЗ.

Узел подвески танка Т-64А.
1 — торсионный вал; 2 и 13 — игольчатые подшипники; 3,12 и 19 — уплотнительные кольца; 4 — ось балансира; 5 — манжета; 6 — зубчатый сектор; 7 — болт; 8 — средняя опора; 9 — гайка; 10 — прокладка; 11 — кольцо; 14 — балансир; 15 — кольцо лабиринтного уплотнения; 16 — заглушка; 17-пробка; 18 — шарики; 20 — винт; 21 — крышка; 22 — пружинное кольцо; 23 — ось гидроамортизатора.

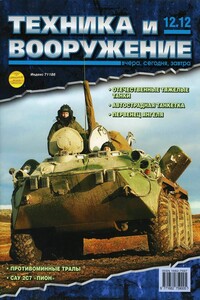
Опытный танк Т-64А с ГТСУ преодолевает участок заболоченной местности.
Продолжение следует

Зенитный пушечно-ракетный комплекс «ТУНГУСКА»
Владимир Коровин
Окончание.
Начало см. в «ТиВ» № 4,5/2011 г.
Использованы фото А. Чирятникова \ и из архивов автора и редакции.
Установленная на боевой машине цифровая вычислительная система 1А26М предназначалась для решения задач управления и стабилизации вооружения, оптического прицела и радиолокационных средств, выработки команд управления полетом ЗУР при боевой работе, а также для проверки правильности функционирования систем в контрольных режимах.
Оптический прицел, состоящий из прицельно-оптического оборудования, системы наведения и стабилизации оптического прицела, аппаратуры выделения координат ИК-пеленгатора ракеты, предназначался для обнаружения и сопровождения по оптическому каналу цели и ракеты, определения и выдачи их координат цифровой вычислительной системе для решения задач управления огнем и выработки команд управления полетом ракеты.
Сочетание различных способов сопровождения цели по угловым координатам и по дальности средствами боевой машины обеспечивало несколько режимов ее работы:
— по трем координатам цели, полученным от радиолокационной системы;
— по дальности до цели, полученной от радиолокационной системы, и по ее угловым координатам, полученным от оптического прицела;
— инерционное сопровождение цели по трем координатам, полученным от вычислительной системы;
— по угловым координатам, полученным от оптического прицела, и установленной командиром скорости цели.
При стрельбе по наземным движущимся целям использовался режим полуавтоматического или ручного наведения вооружения в упрежденную точку по дистанционной сетке прицела. После поиска, обнаружения и опознавания цели станция сопровождения переходила на ее автосопровождение по всем координатам.
При ведении огня из пушек ЦВС решала задачу встречи снаряда с целью и определяла зону поражения по данным, поступающим с выходных валов антенны ССЦ, из блока выделения сигналов ошибок по угловым координатам и с дальномера, а также из системы измерения углов качек и курса боевой машины. При постановке противником интенсивных помех ССЦ по каналу измерения дальности происходил переход на ручное сопровождение цели по дальности, а в случае его невозможности — на сопровождение цели по дальности от СОЦ или на ее инерционное сопровождение. При постановке противником интенсивных помех ССЦ по угловым каналам сопровождение цели по азимуту и углу места осуществлялось оптическим прицелом, а при отсутствии видимости — инерционно (от ЦВС).
При ведении огня ЗУР использовалось сопровождение цели по угловым координатам с помощью оптического прицела. После пуска ракета попадала в поле зрения оптического пеленгатора аппаратуры выделения координат ракеты. По световому сигналу от трассера определялось отклонение ракеты относительно линии визирования цели (в угловых координатах), параметры которого поступали в ЦВС. В свою очередь, ЦВС вырабатывала команды управления ракетой, поступавшие в шифратор для кодирования в импульсные посылки, которые через передатчик станции сопровождения передавались на ракету. Движение ракеты практически по всей траектории происходило с отклонением от линии визирования цели на 1,5 д.у. для снижения вероятности попадания в поле зрения пеленгатора отстреливаемых целью тепловых помех. Выведение ракеты на линию визирования цели начиналось за 2–3 с до встречи с ней и заканчивалось вблизи от нее. При приближении к цели на расстояние порядка 1 км на ракету передавалась команда на взведение неконтактного взрывателя. После истечения времени, соответствующего пролету ракетой этого расстояния, боевая машина автоматически переводилась в готовность к пуску следующей ЗУР.